iabaldwin.com
home
publications
code
design
ian@iabaldwin
ian.baldy
iabaldwin
CV
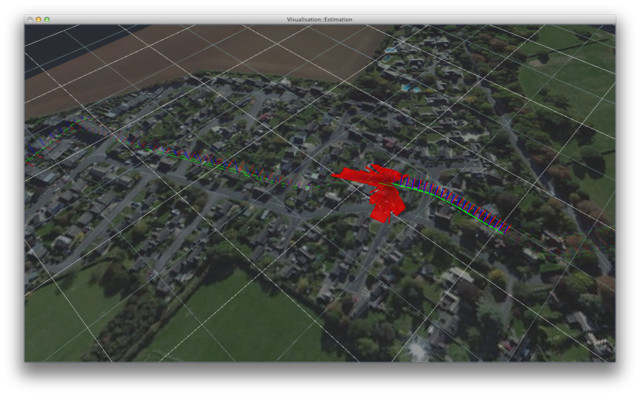
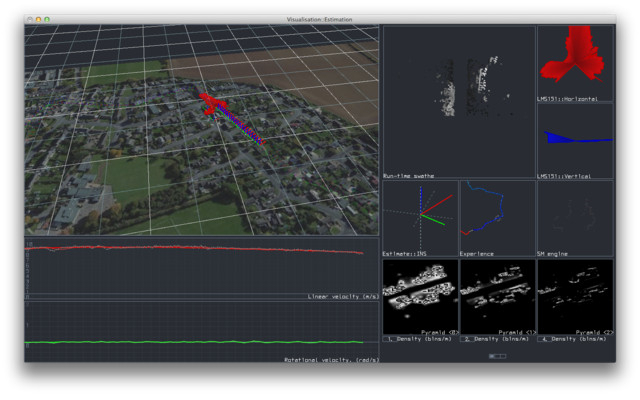
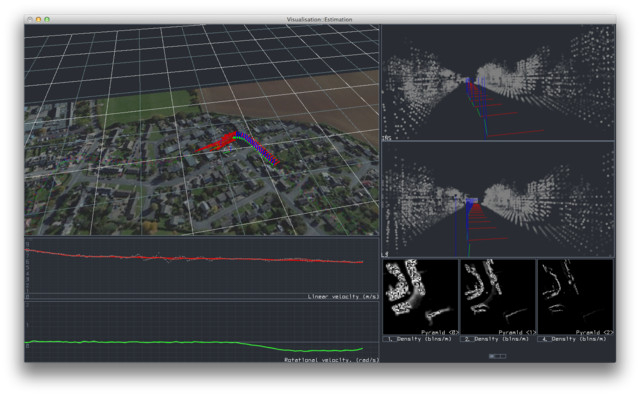
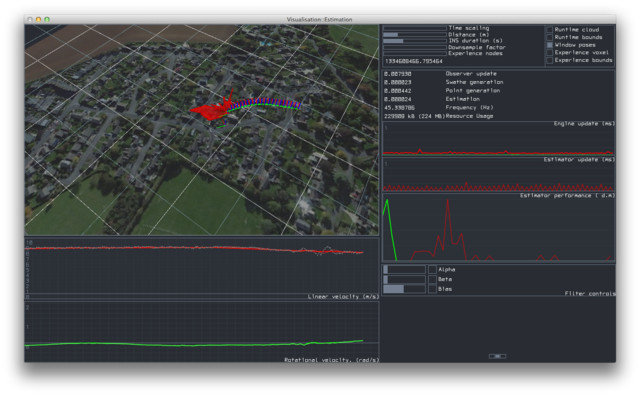
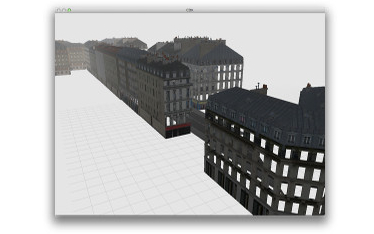
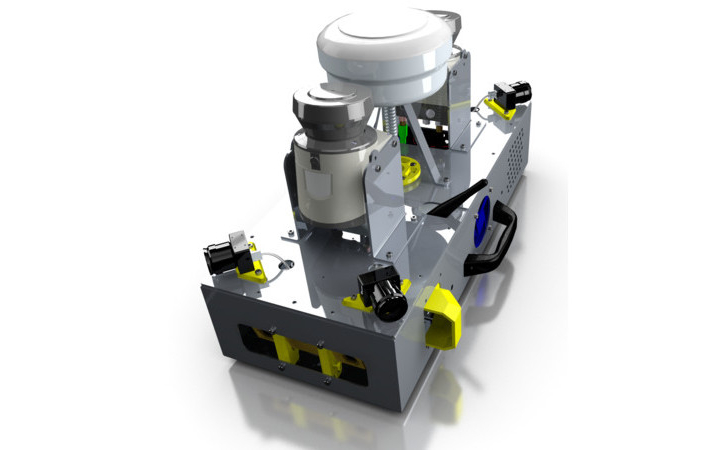
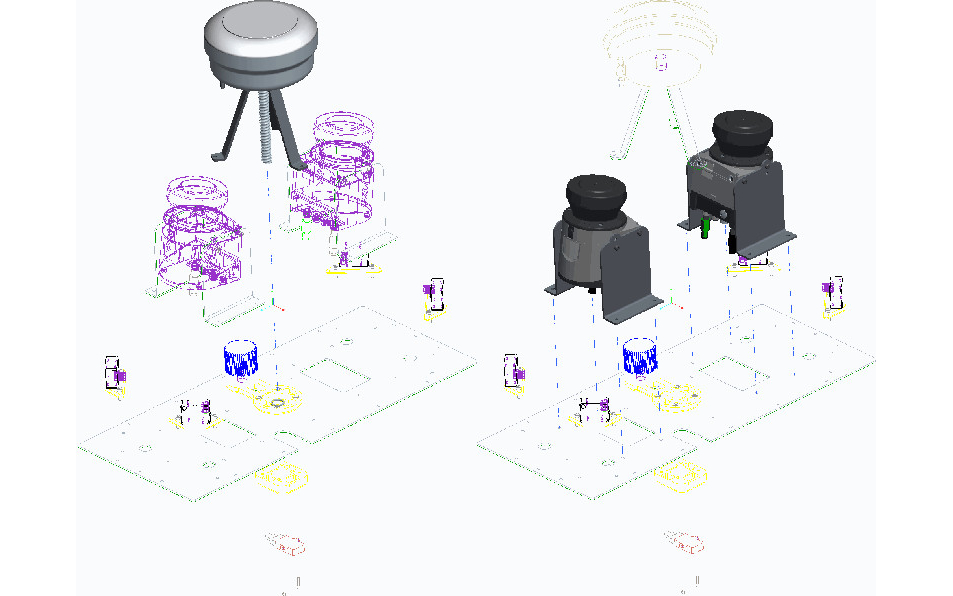
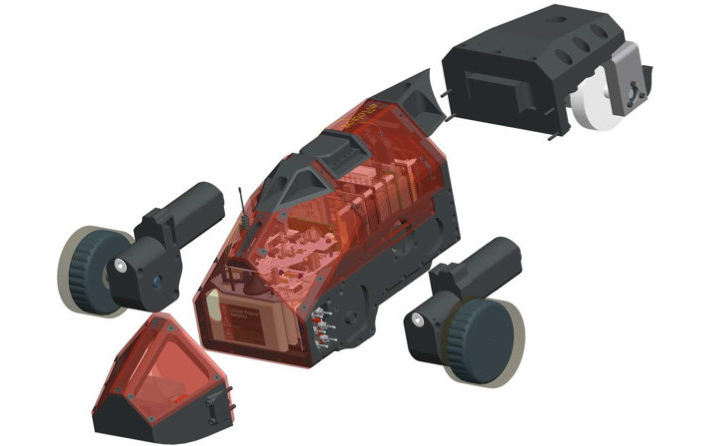
Large–scale Urban Localisation with a Pushbroom LIDAR
2012
Thesis
Laser-only Road-vehicle Localization with Dual 2D Pushbroom LIDARS and 3D priors
2012
IROS
Large-scale Localisation with a Pushbroom LIDAR
2012
ICRA
Non-Parametric Learning for Natural Plan Generation
2010
IROS
Teaching a Randomized Planner to Plan with Semantic Fields
2010
TAROS
Learning to Plan
2009
NIPS